|
Serwis Edukacyjny
Nauczycieli w I-LO w Tarnowie |
Wyjście Spis treści Wstecz Dalej
Autor artykułu |
©2026 mgr Jerzy Wałaszek
|
|
Serwis Edukacyjny
Nauczycieli w I-LO w Tarnowie |
Wyjście Spis treści Wstecz Dalej
Autor artykułu |
©2026 mgr Jerzy Wałaszek
|
Silnik elektryczny (ang. electric motor) jest przetwornikiem elektro-mechanicznym, który przetwarza energię elektryczną w mechaniczną. Silniki służą do napędu różnych urządzeń mechanicznych.
Typowy silnik elektryczny składa się z dwóch podstawowych części:
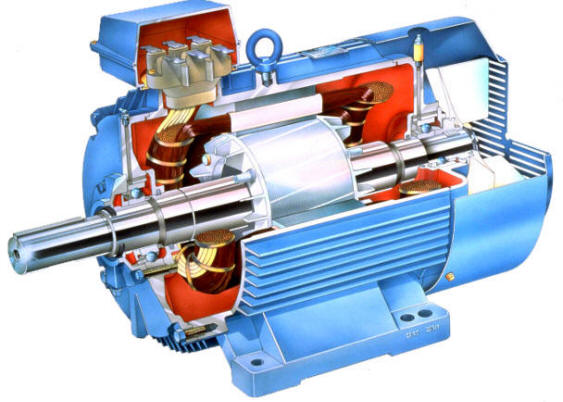
Wirnik osadzony jest na wale, który wyprowadzony jest na zewnątrz obudowy i służy do napędu urządzeń zewnętrznych. Statyw jest na stałe przymocowany do obudowy lub wręcz obudowa jest statywem.
Zasada działania silnika elektrycznego opiera się na oddziaływaniu pól magnetycznych tworzonych przez statyw i wirnik. Pole magnetyczne statywu oddziałuje na pole magnetyczne wirnika w taki sposób, iż wirnik zostaje wprawiony w ruch obrotowy (zaczyna wirować, stąd nazwa wirnik). W zależności od sposobu wytwarzania tych pól magnetycznych w statywie i wirniku silniki elektryczne dzielimy na wiele różnych rodzajów.
Podstawowymi parametrami elektrycznymi silnika są:
Oprócz parametrów elektrycznych silniki elektryczne posiadają również charakterystyki mechaniczne. Zwykle przedstawia się na takiej charakterystyce zależność momentu na wale od prędkości obrotowej wału. Taka charakterystyka pozwala dobrać warunki pracy silnika w konkretnym układzie mechanicznym.
Podział silników można dokonać wg bardzo różnych kryteriów.
W zależności od rodzaju prądu zasilania:
W zależności od sposobu pracy:
W zależności od konstrukcji:
W praktyce elektronika amatora spotkasz się najczęściej z silnikami rotacyjnymi prądu stałego oraz z silnikami krokowymi, dlatego w tym rozdziale omówimy sposoby sterowania tych właśnie silników.
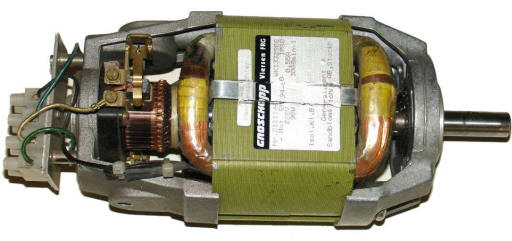
Komutacja oznacza przełączanie. W silniku komutatorowym (ang. commutator motor) stojan wytwarza stałe pole magnetyczne, a wirnik wyposażony jest w kilka cewek, do których prąd dostarczany jest poprzez komutator: Komutator zmienia kierunek prądu w uzwojeniu wirnika wraz z jego obrotem, co powoduje, iż pole wytwarzane w wirniku cały czas oddziałuje z polem stojana, wprawiając wirnik w ruch obrotowy:

Komutator ma postać płytek zamocowanych na stałe na wale silnika. Do płytek komutatora podłączone są cewki uzwojenia wirnika. Po płytkach ślizgają się szczotki, które dostarczają prąd do uzwojeń wirnika. Wraz z obrotem zmienia się zasilanie cewek w wirniku, co powoduje zmianę wytwarzanego przez wirnik pola magnetycznego. Zmiana ta jest konieczna, aby wirnik stale się obracał.
W silnikach prądu stałego (ang. DC motors) stojan zbudowany jest najczęściej z magnesu trwałego w postaci tulejki, wewnątrz której obraca się wirnik. Na powyższym rysunku wirnik składa się z dwóch uzwojeń. W praktyce stosuje się co najmniej trzy uzwojenia na wirniku w celu uniknięcia martwej strefy.

Istnieją również silniki komutatorowe na prąd przemienny. W ich przypadku stojan jest elektromagnesem i posiada własne uzwojenie. Zasada działania jest identyczna: pole magnetyczne stojana oddziałuje z polem magnetycznym wirnika i wprawia wirnik w ruch obrotowy.
Wadą silników komutatorowych jest zużywanie się szczotek i komutatora. Po pewnym czasie, wraz z osadzaniem się zanieczyszczeń na szczotkach i płytkach komutatora, pojawia się iskrzenie, które jest źródłem zakłóceń elektromagnetycznych. Również przełączanie przez komutator cewek w wirniku powoduje nagłe skoki napięcia spowodowane indukcyjnością cewek. Musimy o tym pamiętać, jeśli zasilamy taki silnik z układu elektronicznego.
W kręgu naszych zainteresowań będą małe silniczki prądu stałego o napięciu 3...12V, ponieważ w miarę łatwo można nimi sterować za pomocą mikrokontrolerów. Silnik pobiera zwykle prąd przekraczający obciążalność wyjść mikrokontrolera (20...40mA), który dodatkowo jest zależny od bieżącego obciążenia wału. Dlatego nie powinno się go raczej zasilać z wyjścia układu cyfrowego. W najprostszym przypadku stosujemy tranzystor (bipolarny lub polowy) o odpowiedniej mocy:

W tym rozwiązaniu napięcie zasilające silnik może być wyższe od napięcia zasilającego układ sterujący.
Silnik komutatorowy prądu stałego zmienia kierunek obrotów, jeśli zostanie zmieniona polaryzacja napięcia zasilającego. Powyższy układ pozwala włączać/wyłączać silnik oraz sterować szybkością obrotów poprzez zastosowanie PWM (sterowanie impulsami o regulowanej szerokości). Jeśli chcemy dodatkowo zmieniać kierunek obrotów wału silnika, to należy zastosować układ zwany mostkiem H (ang. H bridge):
Mostek H można zrealizować z różnych tranzystorów (bipolarnych lub polowych). My rozważymy układ pokazany powyżej. Składa się on z 4 tranzystorów: dwóch pnp (T1 i T3) oraz dwóch npn (T2 i T4), z czterech oporników R polaryzujących bazy tranzystorów i z czterech diod D zabezpieczających tranzystory przed przepięciami powstającymi w silniku. Układ posiada dwa wejścia sterujące A i B.
Załóżmy, że do obu wejść A i B przyłożyliśmy niski poziom logiczny (0,4V):
Niskie napięcie przenosi się na bazy tranzystorów i odblokowuje tranzystory pnp T1 i T3. Jednakże tranzystory npn T2 i T4 są zablokowane. Silnik nie będzie pracował, ponieważ jego zaciski są zwarte do plusa zasilania i prąd nie popłynie (brak różnicy potencjałów, czyli napięcie na zaciskach silnika wynosi 0V).
Do obu wejść A i B przykładamy poziom logiczny 1:
Wysokie napięcie przenosi się na bazy tranzystorów. Tranzystory pnp zostają zablokowane, natomiast odblokowują się tranzystory npn. zaciski silnika są zwarte do masy i silnik nie pracuje.
Teraz przykładamy różne poziomy: do wejścia A 1, a do wejścia B 0:
W tym przypadku wysokie napięcie na bazach włącza tranzystor T2, a wyłącza T1. Z kolei niskie napięcie na bazach włącza T3 i wyłącza T4. Zacisk + silnika zostaje połączony z VCC, zacisk - zostaje połączony z masą. Silnik zaczyna pracować. Wał obraca się w kierunku standardowym, np. w prawo.
Zmieniamy poziomy: do wejścia A 0, do wejścia B 1:
Ponieważ układ jest symetryczny, to zmiana spowoduje symetryczne zmiany w tranzystorach: T1 i T4 włączone, T2 i T3 zablokowane. Na zaciskach silnika zmieni się polaryzacja napięcia, wał silnika zacznie się obracać w przeciwną stronę.
Jak zatem widzisz, mostek H pozwala zmieniać kierunek obrotów silnika, a przez podawanie na wejścia A lub B sygnału PWM można regulować obroty.
W mostku należy zastosować tranzystory o obciążalności co najmniej 0,5A, np. pnp – BD140, npn – BD139. Zależy to oczywiście od parametrów sterowanego silnika. Dla bardzo małych silniczków mogą to być popularne tranzystory typu BC557 (pnp) i BC548 (npn). Tranzystory te mają obciążalność do 100 mA.
Istnieją również specjalizowane układy scalone, które w prosty sposób pozwalają na sterowanie silników komutatorowych przez mikrokontroler. Takim układem jest przykładowo popularny sterownik L293D (koszt około 4 zł):
| THT – DIL16 | SMT – SO20 | |
 |
 |
Wewnątrz układ L293D zawiera 4 elektroniczne przełączniki/drivery o wydajności do 600mA, które zwierają swoje wyjścia do napięcia zasilającego lub do masy w zależności od sygnałów sterujących na swoich wejściach:
Funkcje końcówek układu są następujące:
| Vs | – | Napięcie zasilania silników (max. 36V) |
| Vss | – | 5...36V, napięcie zasilające elementy cyfrowe |
| EN1, EN2 | – | Wejścia uaktywniające
przełączniki: EN1 – INP1/OUT1, INP2/OUT2; EN2 – INP3/OUT3, INP4/OUT4. W stanie niskim wejść ENx wyjścia przełączników są w stanie wysokiej impedancji. |
| INP1...INP4 | – | Wejścia przełączające. W stanie niskim, wyjścia przełączników są zwarte do masy, w stanie wysokim wyjścia są zwarte do Vs. Przełączniki muszą być uaktywnione sygnałem EN. |
| OUT1...OUT4 | – | Wyjścia przełączników: stan wysokiej impedancji (EN = 0), Vs (EN = 1, INP = 1) lub GND (EN = 1, INP = 0). |
| GND | – | Masa |
Układ L293D jest równoważny 2 mostkom H, jednak można go wykorzystać do sterowania silnikami w różnych kombinacjach:
Silnik M1 może zmieniać kierunki obrotów. Silnik M2 jest włączany stanem wysokim INP4, silnik M3 jest włączany stanem niskim INP3.
Układ L293D powinien być wyposażony w radiator. Funkcje radiatora dla małych obciążeń mogą pełnić końcówki masy, jeśli zostaną przylutowane do odpowiednio dużego pola na płytce PCB.
Komutator jest rozwiązaniem kłopotliwym, ponieważ w sposób mechaniczny przełącza prąd w cewkach wirnika. Powoduje to iskrzenie na styku płytek komutatora i ślizgających się po nim szczotek. Jako element mechaniczny komutator zużywa się w trakcie pracy, co prowadzi do pogorszenia parametrów silnika wraz z upływem czasu. Z tego powodu opracowano silniki prądu stałego bez komutatora zwane również silnikami bezszczotkowymi (ang. brushless motors).
W silnikach tego typu komutator zastąpiony jest układem elektronicznym, który odpowiednio przełącza cewki w wirniku lub częściej w stojanie, aby wytworzyć wirujące pole magnetyczne. Pole to oddziałuje z polem magnesu trwałego w wirniku lub w stojanie, co wprawia wirnik w ruch obrotowy.

Silniki bezszczotkowe można spotkać w różnych urządzeniach, np. w napędach DVD/BluRay:

Silniki bezszczotkowe wyposażone są w elementy Halla, które reagują na pole magnetyczne wirnika, który jest zwykle magnesem trwałym. Układ elektroniczny odczytuje stan czujników Halla i na tej podstawie określa położenie magnesu wirnika. Odpowiednio do tego położenia są zasilane cewki stojana, które wytwarzają pole magnetyczne oddziałujące z polem magnesu trwałego. W efekcie wirnik jest wprawiany w ruch obrotowy.
Sterowanie silnikiem bezszczotkowym jest skomplikowane i najczęściej wykonuje się je za pomocą specjalizowanych układów scalonych. Zadanie to można również rozwiązać za pomocą mikrokontrolera.
Silnik krokowy (ang. step motor) wykonuje obroty wału o pewien zadany kąt, zwany tutaj krokiem. Pozwala to na bardzo precyzyjne sterowanie różnych urządzeń (napędy DVD/Bluray, drukarki, roboty, obrabiarki sterowane numerycznie, itp.).
Konstrukcje silników krokowych są różne. Zwykle wyposażone są w zestaw cewek w stojanie, które wytwarzają pole magnetyczne, oraz magnes trwały jako wirnik. Przez zasilanie cewek stojana w odpowiedniej kolejności wymuszamy obrót wirnika o zadany kąt:
Załóżmy, że silnik krokowy posiada cztery cewki w stojanie, A, A', B i B':
Jeśli przez żadną z cewek nie płynie prąd, to położenie wirnika nie jest określone – zwykle wirnik może obracać się wokół osi.
 |
Krok 1Zasilamy cewkę A. Pole magnetyczne |
 |
Krok 2Przestajemy zasilać cewkę A, |
 |
Krok 3Przestajemy zasilać cewkę B, |
 |
Krok 4Przestajemy zasilać cewkę A', |
Następny krok obróci wirnik do położenia wyjściowego. Na jeden obrót wału silnika przypadają 4 kroki:
Lepsze parametry osiąga się, jeśli sterowane są dwie naprzeciwległe cewki. Prądy w cewkach muszą mieć zwroty przeciwne, aby wytwarzać odwrotny strumień magnetyczny:
1 |
2 |
3 |
4 |
Jeśli po kroku 4 nastąpi krok 1, to wirnik wróci do położenia wyjściowego, wykonawszy jeden pełny obrót. Wykres prądowy jest następujący:

Tego typu sterowanie łatwo uzyskuje się przez połączenie szeregowe naprzeciwległych cewek stojana. Połączenie takie może być wykonane fabrycznie wewnątrz silnika:
Zaletą jest to, iż silnik pracuje równiej, ponieważ nie występują naprężenia boczne wału (siła jest obustronna).
Cewki uzwojenia stojana mogą również być zasilane parami:
1 |
2 |
3 |
4 |
Zwróć uwagę, iż w tym przypadku wirnik ustawia się pomiędzy biegunami cewek stojana. Jest obrócony o 45° w prawo w stosunku do położenia przy sterowaniu pojedynczą cewką.
Jeśli cewki naprzeciwległe połączymy szeregowo przy tym samym sterowaniu, to otrzymamy:
1 |
2 |
3 |
4 |

Liczbę kroków można dwukrotnie zwiększyć sterując odpowiednio prądami cewek:
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
Jeśli mamy dostęp do pojedynczych cewek stojana, to możemy wykorzystać prosty układ tranzystorowy do sterowania silnikiem krokowym:
Jeśli cewki połączymy w pary AA', BB', to do sterowania możemy wykorzystać dwa mostki H, najlepiej z układu L293D:
Silniki krokowe posiadają zwykle wirniki złożone z kilku magnesów trwałych:
Rozwiązanie to pozwala obracać wał silnika o mniejszy kąt przy każdym kroku, co zwiększa precyzję. Jednakże zasady sterowania pozostają takie same.
Teraz krótko pomówimy o wyprowadzeniach silników krokowych oraz o sposobach łączenia ich uzwojeń.
Silniki krokowe posiadają zwykle wiele biegunów magnetycznych, jednakże możemy je potraktować tak, jakby zawierały tylko dwa uzwojenia:
Jeśli w silniku krokowym mamy jedną cewkę na obwód magnetyczny (jak powyżej na obrazku), to taki silnik nazywamy bipolarnym silnikiem krokowym (ang. bipolar stepper motor). Początki cewek mają tutaj oznaczenia A1 i B1, a końce mają oznaczenia A2 i B2. Aby silnik mógł wykonać kolejne kroki, należy zmieniać kierunki prądów w cewkach A i B, jak pokazano wcześniej w tym podrozdziale. Z tego powodu sterowanie silnikiem bipolarnym wymaga dwóch mostków H.
Jeśli w silniku krokowym cewka obwodu magnetycznego jest dzielona i jej końcówki są wyprowadzone, to silnik nazywamy unipolarnym silnikiem krokowym (ang. unipolar stepper motor):
W takim silniku zasilane są poszczególne cewki w kolejności pokazanej wcześniej w tym rozdziale. Sterowanie jest prostsze od silnika bipolarnego, ponieważ nie ma potrzeby zmiany kierunku prądu w cewce.
W zależności od typu silnika spotkasz się z następującymi konfiguracjami wyprowadzeń:
| Silnik krokowy | |||
| unipolarny | bipolarny | ||
| 8 wyprowadzeń | 6 wyprowadzeń | 5 wyprowadzeń | 4 wyprowadzenia |
 |
 |
 |
 |
W praktyce do sterowania silnikami krokowymi wykorzystuje się różne układy scalone sterowników (np. A4988 do sterowania silników bipolarnych). Wygląda to mniej więcej tak:
Na wejście KROK podaje się impulsy, które powodują obrót wału silnika o zadany krok. Sygnał na wejściu KIERUNEK określa kierunek obrotu wału. Dodatkowo sterowniki posiadają również wejścia określające tryb pracy, np. praca 1 krok lub 1/2 kroku.
Serwomechanizm, zwany w skrócie serwo (ang. servo), jest zamkniętym układem wyposażonym w układ sterowania ze sprzężeniem zwrotnym, który zamienia wielkość wejściową w określoną wielkość mechaniczną, np. prędkość obrotową lub przesunięcie.

Serwa dzielimy na analogowe i cyfrowe. Aby zrozumieć zasadę pracy serwa, spójrz na rysunek poniżej:
Serwo zbudowane jest z silnika na prąd stały, przekładni, potencjometru połączonego z wałem wyjściowym, na którym osadzona jest obustronna dźwignia, układu sterowania silnikiem.
Załóżmy, iż serwo odwzorowuje napięcie wejściowe w odpowiedni kat obrotu dźwigni. Potencjometr tworzy dzielnik napięcia odniesienie UREF:
Napięcie odniesienia podawane jest na wejście komparatora. Na drugie wejście podawane jest wejściowe napięcie sterujące:
Napięcie wyjściowe z komparatora określają zależności:

Wyjście komparatora połączone jest z układem sterującym silnikiem:
Układ zmienia odpowiednio kierunek obrotów silnika w zależności od zwrotu napięcia z komparatora lub wyłącza silnik, jeśli napięcie to wynosi 0V. Z kolei silnik poprzez przekładnie steruje położeniem dźwigni oraz wychyleniem sprzężonego z nią potencjometru. Tworzy się tutaj sprzężenie zwrotne. W efekcie dźwignia ustawia się pod takim kątem φ, aby napięcie UREF z potencjometru zrównało się z napięciem sterującym UC.
Oczywiście diabeł tkwi w szczegółach. Ponieważ serwa są najczęściej sterowane z układów cyfrowych, to sygnałem wejściowym jest zwykle sygnał PWM, czyli impulsy o regulowanej szerokości. Wychylenie dźwigni serwa zależy w takim przypadku od czasu trwania impulsu PWM (serwo o zakresie obrotów od 0° do 180°):
 |
 |
 |
Serwa posiadają trzy wyprowadzenia, dwa do zasilania oraz jedno na sygnał PWM. Konkretna kolejność zależy od producenta i tutaj musisz sprawdzić w danych technicznych. Najczęściej masa posiada kolor czarny lub niebieski, plus zasilania to kolor czerwony, a pozostałe wyprowadzenie (np. pomarańczowe) to sygnał PWM.
Dokładne parametry sygnału sterującego (częstotliwość impulsów, długość impulsów, kąty wychylenia, moment obrotowy, itd.) serwomechanizmem znajdziesz w danych technicznych. Podane tutaj informacje mają za zadanie jedynie przybliżyć ci zasady działania serwomechanizmów.
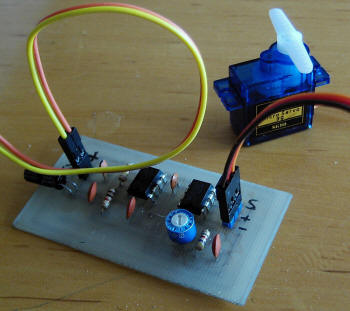
Jako ćwiczenie proponuję zbudowanie prostego układu testowania serwa. Będzie on oparty na dwóch układach NE555. W sieci można spotkać rozwiązania wykorzystujące tylko jeden układ NE555, lecz ich praca nie jest stabilna. Idea tego układu jest następująca:
Układ składa się z generatora przebiegu 50 Hz oraz uniwibratora, który generuje impulsy o szerokości regulowanej potencjometrem od około 0,5 ms do 2,5 ms. Generator tworzy impulsy wyzwalające uniwibrator. Gdy impuls wyzwalający zostanie podany na wejście uniwibratora, zostaje on wytrącony ze stanu stabilnego i generuje impuls na wyjściu PWM, które steruje wychyleniem dźwigni serwa. Generatory zostaną zbudowane w oparciu o układ NE555. Schemat jest następujący:
Musimy teraz obliczyć wartości oporników: R1, R2, R3 (potencjometr), R4 oraz kondensatorów C1 i C2. Generator ma produkować przebieg o częstotliwości około 50 Hz (okres 20 ms):
Krótkie, ujemne impulsy będą wyzwalały uniwibrator. Obliczamy:

Czas ujemnego impulsu tL jest pomijalnie mały w stosunku do czasu okresu T. W podrozdziale o układzie NE555 podaliśmy wzory, które pozwalają obliczyć oporności i pojemności:

Wartość opornika R2 może być mniejsza niż wyliczona, to da po prostu krótszy impuls wyzwalający. Dlatego przyjąłem jako R2 1kΩ.
Liczymy drugi opornik:

Częstotliwość generatora wynosi:

Teraz obliczamy parametry uniwibratora. Ma on generować impuls o minimalnym czasie trwania poniżej 1 ms, i maksymalnym czasie trwania powyżej 2 ms. Załóżmy, że zakres ten wynosi 0,5 ... 2,5 ms.

Mamy już wszystkie elementy. Ostateczny schemat wygląda następująco:

| Elementy | Ilość | Uwagi |
| NE555 | 2 | |
| Podstawka DIL-8 | 2 | |
| Opornik 1kΩ | 1 | 0,25W |
| Opornik 4,7kΩ...5,1kΩ | 1 | 0,25W |
| Opornik 270kΩ | 1 | 0,25W |
| Potencjometr montażowy 20kΩ | 1 | |
| Kondensator 10nF | 2 | ceramiczny |
| Kondensator 100nF | 3 | ceramiczny |
| Kondensator 10µF...47µF | 1 | elektrolityczny |
| Goldpiny męskie 1x2 | 1 | |
| Goldpiny męskie 1x3 | 1 |
| serwo.sch | : | schemat ideowy w Eagle |
| serwo.brd | : | projekt płytki drukowanej w Eagle |
| serwo_a.png | : | obrazek z widokiem elementów na płytce |
| serwo_b.png | : | obrazek spodu płytki |
| serwo.svg | : | plik Inkscape do wydruku na drukarce laserowej |
 |
 |
|
|
Zespół Przedmiotowy Chemii-Fizyki-Informatyki w I Liceum Ogólnokształcącym im. Kazimierza Brodzińskiego w Tarnowie ul. Piłsudskiego 4 ©2026 mgr Jerzy Wałaszek |
Materiały tylko do użytku dydaktycznego. Ich kopiowanie i powielanie jest dozwolone pod warunkiem podania źródła oraz niepobierania za to pieniędzy.
Pytania proszę przesyłać na adres email:
Serwis wykorzystuje pliki cookies. Jeśli nie chcesz ich otrzymywać, zablokuj je w swojej przeglądarce.
Informacje dodatkowe.

{kind=link}