|
Serwis Edukacyjny
Nauczycieli w I-LO w Tarnowie |
Wyjście Spis treści Wstecz Dalej
Autor artykułu |
©2026 mgr Jerzy Wałaszek
|
|
Serwis Edukacyjny
Nauczycieli w I-LO w Tarnowie |
Wyjście Spis treści Wstecz Dalej
Autor artykułu |
©2026 mgr Jerzy Wałaszek
|
Bardzo często będziesz chciał, aby twoje urządzenie wydawało jakieś dźwięki. Wystąpi zatem potrzeba użycia głośnika (ang. loudspeaker).
Głośnik jest przetwornikiem elektro-mechanicznym, który zamienia energię elektryczną w energię fali akustycznej. Fala akustyczna jest zaburzeniem ciśnienia w atmosferze, które rozprzestrzenia się z szybkością około 340 m/s. Gdy zaburzenie to trafi do naszych uszu, odbieramy je jako wrażenie dźwięku.
Istnieje wiele rodzajów głośników. Najprostsze do zrozumienia są głośniki membranowe magnetoelektryczne o następującej budowie:
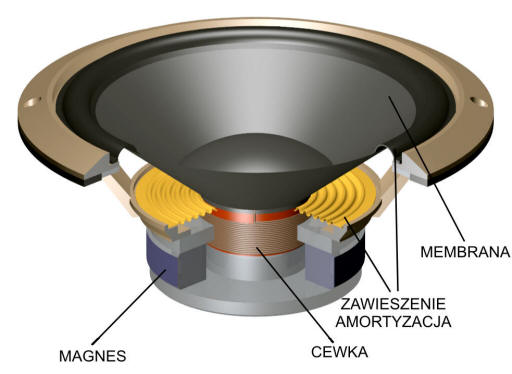
Do membrany wykonanej z odpowiednio sztywnego i wytrzymałego tworzywa jest u spodu przymocowana cewka nawinięta cienkim drutem. Cewka może poruszać się w polu magnetycznym silnego magnesu trwałego. Membrana jest zawieszona w obudowie głośnika w ten sposób, iż może wraz z cewką wykonywać ruchy posuwisto zwrotne.
Gdy przez cewkę zacznie płynąć prąd, to wytworzy ona własne pole magnetyczne, które będzie oddziaływało z polem magnesu, co spowoduje wciągnięcie lub wypchnięcie membrany. Zmiana kierunku prądu płynącego przez cewkę zmieni kierunek ruchu membrany. Ruch membrany powoduje zagęszczanie lub rozrzedzanie powietrza przed nią, a to tworzy falę akustyczną. Możesz przyjąć, że ruch membrany tworzy falę dźwiękową o kształcie zbliżonym do kształtu przebiegu prądu płynącego przez cewkę.
Cechami charakterystycznymi głośnika są:
Impedancja cewki: zwykle jest nieduża, ponieważ cewka musi posiadać małą masę, a zatem nie może zawierać zbyt wielu zwojów. Najczęściej jest to 4/8/16Ω.Pełny zakres słyszalnych częstotliwości dla człowieka obejmuje dźwięki od częstotliwości 20Hz do 20kHz. Jednak większość ludzi słyszy dobrze do 16kHz, a osoby starsze nawet mniej, np. 8...10kHz. Zbudowanie głośnika, który dobrze przenosi cały zakres częstotliwości akustycznych i do tego nie wprowadza zniekształceń, jest stosunkowo trudne. Dlatego stosowane są kolumny głośnikowe, które zawierają kilka rodzajów głośników tak połączonych, aby generowane przez nie dźwięki pokrywały zakres np. od 40Hz do 16kHz.

Konstrukcją kolumn głośnikowych nie będziemy się tutaj zajmować, ponieważ jest to zagadnienie bardzo obszerne i skomplikowane. Najlepiej kupić gotową, fabryczną kolumnę.
Przemysł elektroniczny produkuje całą gamę głośników membranowych:
 Głośnik niskotonowy/basowy |
 Głośnik średniotonowy |
 Głośnik wysokotonowy |
  Głośniki miniaturowe |
Na schematach elektronicznych głośniki przedstawia się za pomocą symbolu:

Dla amatorów ciekawą propozycją są głośniki miniaturowe, które można montować w niewielkich urządzeniach. Z uwagi na małą impedancję, głośnika nie można podłączać bezpośrednio do wyjść cyfrowych, ponieważ grozi to ich uszkodzeniem. Załóżmy, że mamy głośnik miniaturowy o impedancji 8Ω i mocy 0,5W:

Chcemy podłączyć go do wyjścia cyfrowego, np. w taki sposób:
Głośnik możemy w uproszczeniu potraktować jak opornik (w rzeczywistości jest to element indukcyjny, którego impedancja rośnie wraz z częstotliwością prądu przezeń płynącego).
W stanie niskim na wyjściu układu cyfrowego panuje napięcie około 0,8V. Zgodnie z prawem Ohma przez cewkę głośnika będzie płynął prąd spoczynkowy:

Prąd wyjściowy typowego układu cyfrowego to co najwyżej kilkadziesiąt mA (dla TTL 16mA), zatem mamy zbyt duży pobór prądu. Jeszcze gorzej będzie, gdy na wyjściu układu pojawi się stan wysoki, czyli około 3,3V (dla TTL, 5V dla HCT):

Tego żaden układ cyfrowy nie wytrzyma.
Jak widzisz, nie można sterować głośnikiem bezpośrednio z wyjścia cyfrowego. Należy zastosować prosty wzmacniacz tranzystorowy:
Wzmacniacz tworzy tranzystor T (npn, np. BC 547) i opornik R. Dobierzemy teraz wartość oporności opornika R.
Najpierw określimy prąd, jaki powinien płynąć przez głośnik.
Prąd maksymalny policzymy ze wzoru na moc:

Przy takim prądzie dźwięk byłby zbyt głośny i obciążałby zbytnio tranzystor BC547, dla którego prąd maksymalny to 100mA (jeśli faktycznie potrzebujesz głośny sygnał, należy zastosować mocniejszy tranzystor, np. BD135, który wytrzymuje prąd rzędu 1,5A lub 2N2222 – 0,8A z radiatorem). Ustalmy zatem prąd głośnika na poziomie 80mA.
Współczynnik wzmocnienia prądowego β tranzystora BC547 wynosi więcej niż 100 (dla BD135 więcej niż 40):
 |
| β – współczynnik wzmocnienia prądowego IC – prąd kolektora IB – prąd bazy |
Stąd obliczamy wymagany prąd bazy tranzystora T:

W trakcie przewodzenia tranzystora na złączu baza emiter odkłada się napięcie około 0,7V. Tranzystor ma przewodzić, gdy na wyjściu układu cyfrowego jest stan wysoki (około 3,3V dla TTL, 5V dla HCT):
Wyliczamy spadek napięcia na oporniku R:

Wyliczamy wartość oporu opornika R:

I ostatecznie:
Jako ćwiczenie policz opornik R dla tranzystorów BD135 i BC547 z głośnikiem 16Ω/0,1W.
Głośniki pozwalają odtwarzać dowolne dźwięki w swoim paśmie odtwarzania. Często jednak potrzebujemy prostego sygnalizatora dźwiękowego, który wydaje pisk o wybranej częstotliwości, np. do sygnalizacji jakiegoś zdarzenia, naciśnięcia klawisza, zakończenia procesu, itp. Do tego celu przemysł elektroniczny produkuje proste brzęczyki (ang. buzzers).

Brzęczyki mogą być pasywne (wymagają sterowania sygnałem o odpowiedniej częstotliwości) lub aktywne (zawierają wewnętrzny generator).
Brzęczyk pasywny (ang. passive buzzer) to najczęściej mały głośniczek piezoelektryczny. Pod wpływem napięcia piezoelektryk zmienia swoje wymiary. Jeśli napięcie będzie zmienne, to zmiana wymiarów piezoelektryku będzie za nim podążała, wywołując drgania mechaniczne, a te z kolei tworzą falę dźwiękową. Tego typu brzęczyki posiadają dwa wyprowadzenia z oznaczoną biegunowością:

Głośniczki piezoelektryczne nadają się właściwie tylko do odtwarzania pisków i dźwięków o wysokich częstotliwościach, ponieważ w niskim zakresie częstotliwości ich sprawność spada i pojawiają się duże zniekształcenia.
Brzęczyki pasywne pobierają prąd około 30mA, zatem można je podłączać bezpośrednio do wyjść cyfrowych, jednak zalecane jest połączenie poprzez tranzystor w jednym z poniższych układów:
Pierwszy wykorzystuje tranzystor npn, np. BC547, a w drugim zastosowany został tranzystor pnp, np. BC557. Różnica polega w nich na tym, iż w pierwszym tranzystor jest aktywowany (zaczyna przewodzić) przy stanie wysokim na wyjściu układu cyfrowego, a w drugim przy stanie niskim. Brzęczyk piezoelektryczny zachowuje się trochę jak kondensator, dlatego równolegle z nim wpina się opornik rozładowujący 1kΩ, co polepsza odtwarzanie dźwięków. Układ cyfrowy powinien umieszczać na swoim wyjściu przebieg o pożądanej częstotliwości. Przebieg ten zostanie odtworzony przez brzęczyk w postaci fali dźwiękowej.
Brzęczyk aktywny (ang. active buzzer) posiada wewnątrz obudowy generator, który steruje głośniczkiem piezoelektrycznym. ułatwia to zastosowanie – wystarczy dostarczyć napięcie zasilające do brzęczyka, aby ten zaczął wytwarzać ton. Wadą jest to, iż brzęczyk aktywny potrafi generować tylko jeden dźwięk o określonej częstotliwości. Układ sterujący brzęczykiem wygląda tak:

Pierwszy układ włącza brzęczyk stanem wysokim na wyjściu cyfrowym, drugi stanem niskim.
W sprzedaży można spotkać tzw. silniki wibracyjne (ang. vibration motors). Uruchomienie silnika powoduje powstanie wyczuwalnych wibracji. Stosuje się je w telefonach komórkowych do sygnalizacji, gdy wyłączony jest głośnik.
Zasada działania jest bardzo prosta. Na wale silniczka zamocowany jest mimośrodowo ciężarek. Obroty wału powodują powstawanie wibracji. Silniczek może pobierać prąd powyżej 40mA, dlatego należy zastosować prosty układ z tranzystorem, np. 2N2222 (npn, prąd kolektora do 0,8A, β = 75):
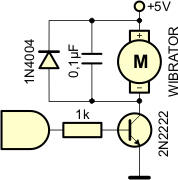
Równolegle z silnikiem włączamy diodę i kondensator. Silniczki posiadają wewnątrz tzw. komutatory, które służą do przełączania prądu płynącego poprzez cewki wirnika. W trakcie przełączania występuje iskrzenie. kondensator ma na celu filtrowanie zakłóceń powstających przy iskrzeniu. Cewki wirnika są elementami indukcyjnymi i w trakcie przełączania indukuje się w nich siła elektromotoryczna o kierunku przeciwnym do zmian napięcia zasilającego cewkę. Gdy powstanie takie napięcie wsteczne, to zadziała dioda, która zredukuje je do około 0,7V. Układ zasilania silnika jest bardzo podobny do układu sterowania przekaźnikiem.
Mikrofon (ang. microphone) pełni rolę odwrotną do głośnika, tzn. pozwala przetwarzać fale akustyczne na odpowiadający im sygnał elektryczny.

Produkowane jest wiele rodzajów mikrofonów. Oto trzy z nich (opis innych znajdziesz bez trudu w sieci):
Mikrofon dynamiczny (ang. dynamic microphone) ma budowę podobną do głośnika:
Posiada ruchomą membranę, do której przymocowana jest cewka umieszczona w silnym polu magnetycznym. Ruch membrany wywołany falą akustyczną powoduje ruch cewki w polu magnesu i indukowanie się w niej napięcia, które jest proporcjonalne do szybkości ruchu. W ten sposób fala akustyczna zostaje zamieniona w prąd elektryczny (jeśli zamkniemy obwód cewki). Prąd ten odzwierciedla zmiany ciśnienia akustycznego wywieranego na membranę mikrofonu, a zatem kształt fali akustycznej. Elementy ruchome mikrofonu powinny mieć małą masę, gdyż inaczej jej bezwładność wywołuje zniekształcenia odbieranych dźwięków. Jest to pewna przeszkoda techniczna, która sprawia, iż mikrofony dynamiczne nie mają wysokich parametrów jakościowych.
Mikrofon pojemnościowy (ang. capacitor microphone) posiada membranę, która stanowi jedną okładkę kondensatora:
Pod membraną znajduje się sztywna płytka metalowa, która jest drugą okładką. Fala akustyczna powoduje odkształcenia membrany, a ta z kolei zbliża się lub oddala od płytki tylnej. Membrana wraz z płytką tworzą kondensator. Pojemność tego kondensatora zależy od odległości membrany od płytki tylnej. Zmiany tej odległości przy drganiu membrany powodują zmiany pojemności kondensatora, które następnie są zamieniane w użyteczny sygnał elektryczny przez odpowiedni przetwornik.
Masa membrany w mikrofonie pojemnościowym jest dużo mniejsza od masy membrany z cewką w mikrofonie dynamicznym. Z tego powodu mikrofon pojemnościowy dużo wierniej rejestruje odbieraną falę dźwiękową. Kondensator musi być polaryzowany wstępnie dosyć wysokim napięciem 40...200V.
Mikrofon elektretowy (ang. electret microphone) zbudowany jest praktycznie tak samo jak mikrofon pojemnościowy. Różnica polega na tym, iż jedna z okładek kondensatora jest wykonana z elektretu, czyli materiału, który trwale przechowuje ładunek elektryczny. Dzięki temu rozwiązaniu kondensator nie musi być wstępnie polaryzowany napięciem.

Z mikrofonami elektretowymi spotkasz się najczęściej, ponieważ są tanie i powszechnie stosowane np. w telefonach komórkowych.
Zwykle posiadają wbudowany wzmacniacz na tranzystorze polowym, co sprawia, że ich zastosowanie staje się bardzo proste.
Na schematach elektrycznych mikrofony oznacza się symbolem:

Mikrofon jest urządzeniem analogowym, tzn. zamienia falę akustyczną w ciągły sygnał elektryczny. Z tego powodu mikrofonu raczej nie można bezpośrednio zastosować w sprzęcie cyfrowym. Należy użyć tzw. przetwornika analogowo-cyfrowego (ang. A/D converter). Schematycznie wygląda to tak:
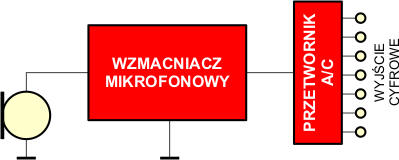
Sygnał z mikrofonu jest wzmacniany przez wzmacniacz, aby dopasować jego poziom do parametrów przetwornika A/C. Przetwornik próbkuje z określoną częstotliwością napięcie wejściowe i na wyjściu cyfrowym umieszcza wartość tego napięcia w postaci n-bitowej liczby dwójkowej. Wyjście cyfrowe może być odczytywane przez mikrokontroler. Jakość przetwarzania zależy od częstotliwości próbkowania oraz liczby bitów. Na przykład profesjonalne przetworniki próbkują z częstotliwością 44kHz przy rozdzielczości 16-bitów. Takie przetworniki masz na swojej karcie dźwiękowej w komputerze IBM-PC. Również mikrokontrolery posiadają wbudowane przetworniki A/C (najczęściej 10-bitowe), które pozwalają im odczytywać i przetwarzać sygnały analogowe – zajmiemy się tym szerzej w osobnych rozdziałach tego artykułu.
|
|
Zespół Przedmiotowy Chemii-Fizyki-Informatyki w I Liceum Ogólnokształcącym im. Kazimierza Brodzińskiego w Tarnowie ul. Piłsudskiego 4 ©2026 mgr Jerzy Wałaszek |
Materiały tylko do użytku dydaktycznego. Ich kopiowanie i powielanie jest dozwolone pod warunkiem podania źródła oraz niepobierania za to pieniędzy.
Pytania proszę przesyłać na adres email:
Serwis wykorzystuje pliki cookies. Jeśli nie chcesz ich otrzymywać, zablokuj je w swojej przeglądarce.
Informacje dodatkowe.
