©2008 mgr Jerzy Wałaszek
I LO w Tarnowie
![]()
|
|
©2008 mgr Jerzy Wałaszek
|
W niniejszej pracy, która ma charakter elementarny, propedeutyczny, ograniczymy się do problemu dwóch ciał. Zaniedbamy nieznaczne, zaburzające przyspieszenia grawitacyjne (zarówno dodatnie, jak i ujemne) działające na dwa ciała tworzące układ grawitacyjny, a wywołane działaniem trzeciej (lub kolejnej), odległej masy (np. oddziaływania perturbacyjne wywoływane przez Jowisza).
Jak wiadomo problem ten jest dokładnie rozwiązany analitycznie na gruncie newtonowskiej teorii grawitacji. Przy zadanych warunkach początkowych (energia potencjalna układu i moment pędu) możemy wyznaczyć elementy orbity: okres ruchu, półoś wielką, (w przypadku elipsy) mimośród. Rozwiązanie wspomnianego zagadnienia leży raczej poza możliwościami ucznia szkoły średniej: potrzebna jest znajomość całki energii lub wzoru Bineta, wymagane jest odpowiednie przygotowanie matematyczne (teoria krzywych stożkowych, współrzędne biegunowe). Korzystanie z gotowych wzorów – jak się wydaje – jest mało kształcące.
Rozsądną alternatywą dydaktyczną może być podejście numeryczne.
Odpowiedni algorytm jest przedstawiony i dokładnie skomentowany np. w [3], [4]. Do jego zrozumienia
całkowicie wystarczają wiadomości na poziomie niższych klas liceum
(kinematyka i dynamika ruchów jednostajnie zmiennych, prawo
powszechnego ciążenia). Przypomnijmy tutaj krótko i bardzo ogólnie, że
krzywe stożkowe są przybliżane odcinkami  (węzły główne algorytmu), a prędkości vi+1 są liczone w momentach, gdy
ciało znajduje się w węźle pomocniczym (i=1.2....,k+1),
k – krok obliczeń). Przejdźmy do szczegółów.
(węzły główne algorytmu), a prędkości vi+1 są liczone w momentach, gdy
ciało znajduje się w węźle pomocniczym (i=1.2....,k+1),
k – krok obliczeń). Przejdźmy do szczegółów.
Rozpatrzmy ciało centralne o dostatecznie dużej masie M
(np. Słońce) oraz ciało o nieznacznej masie m
(np. planeta). Oznacza to, że nie musimy uwzględniać ruchu ciała o masie
M. Niech w chwili początkowej położenie planety jest określone jej promieniem
wodzącym  . Wiemy, że na planetę działa siła grawitacji skierowana ku
Słońcu
. Wiemy, że na planetę działa siła grawitacji skierowana ku
Słońcu  (p. Rys. 1a).
(p. Rys. 1a).
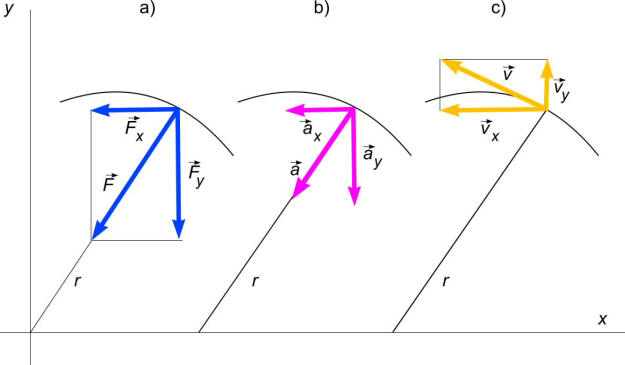
Szukamy składowych przyspieszenia  (p . Rys. 1b).
(p . Rys. 1b).
Z II zasady dynamiki Newtona oraz prawa powszechnego ciążenia:
 ,
,
 ,
,
 (1)
(1)
W celu uproszczenia rachunków można przyjąć (jest to sprawa wyboru jednostek), GM ≡ 1; ostatecznie wzory (1) ulegają znacznemu uproszczeniu (2):
 (2)
(2)
NUMERYCZNE OBLICZENIA BĘDĄ PRZEBIEGAĆ W NASTĘPUJĄCYCH ETAPACH:
wybieramy początkowe współrzędne położenie planety x(0) i y(0),
przyjmujemy początkowe wartości składowych wektora prędkości vx(0) i vy(0),
wybieramy krok rachunków k,
REKURENCJA
liczymy współrzędne planety x(k) i y(k) po pierwszym kroku (i) wykonywanego algorytmu,
wyznaczamy  – dla wygody oznaczonego r
(instrukcja podstawiania),
– dla wygody oznaczonego r
(instrukcja podstawiania),
liczymy składowe wektora przyspieszenia i składowe wektora prędkości po pierwszym kroku wykonywanego programu,
zwiększamy wartość argumentu pętli i + 1, itd.
'NUMERYCZNE OBLICZANIE ORBIT
|
KOMENTARZ LISTINGU Język programu FreeBASIC 0.4.5 |
Cls Screen 9 Color 4, 45 Locate 12, 64: Print "x" Locate 2, 42: Print "y" Window(-320, 175)-(319, -174) Color 3, 63 Line (-250, 0)-(250, 0), 40 Line (0, 170)-(0, -170), 40 |
Współrzędne ekranowe Osie układu |
'WPROWADZANIE DANYCH Dim as double x, y, r, vx, vy, ax, ay, k |
Aby nie mnożyć deklarowanych zmiennych wartości początkowe współrzędnych położenia i prędkości przyjęto zamiast xo, yo, vxo, vyo odpowiednio x, y, vx, vy i wykorzystano instrukcję podstawiania |
'WARUNKI POCZĄTKOWE x = 0.5: y = 0 vx = 0: vy = 1.6 |
|
'RACHUNKI ZASADNICZE (REKURENCJA) k = 1 / 150 |
|
For i = 1 To 10000 x = x + vx * k: y = y + vy * k r = (x * x + y * y) ^ (-3 / 2) ax = -x * r: ay = -y * r vx = vx + ax * k: vy = vy + ay * k Pset(180 * x, 180 * y) Next Sleep |
Wyprowadzenie krzywej na ekran |
Jak wiadomo obliczenia komputerowe nie zawsze gwarantują otrzymanie dokładnych wyników. Ogólnie błędy wyników metod numerycznych związane są m. in z:
dokładnością i ilością danych wejściowych; jeżeli dane te będą mało dokładne lub będzie ich mało, wynik może być obarczony błędem,
błędami popełnionymi przez komputer w trakcie konwersji liczb pomiędzy układami liczbowymi jak i reprezentacją tych liczb w pamięci komputera,
krokiem rachunków i wielkością kroku,
błędami związanymi z zaokrągleniami liczb.
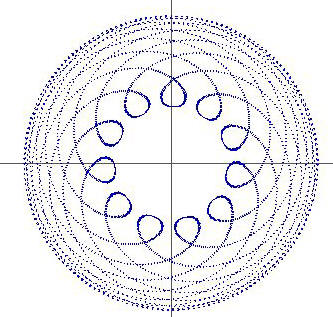
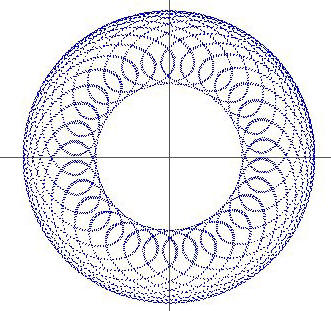
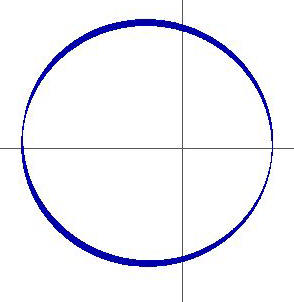
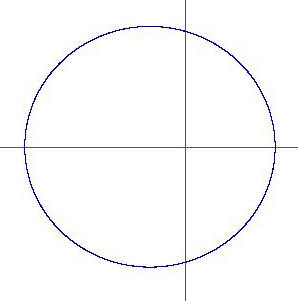
Dla przykładu zilustrujmy, jak wielkość kroków oraz ich ilość wpływa na dokładność wykonywania programu (Rys. 2a-d). Poniższa tabela posłuży do analizy rysunków.
Dane wejściowe (takie same dla Rys. 2a-d)
x0 =0,5, y0 = 0
vxo = 0, vyo = 1,6
| Nr rysunku | Krok rachunków k |
Ilość kroków i |
| Rys. 2a |
 |
10000 |
| Rys. 2b |
 |
100000 |
| Rys. 2c |
 |
100000 |
| Rys. 2d |
 |
1000000 |
Rys. 2
| a)
|
b)
|
| c)
|
d)
|
Algorytm wydaje się być bezpieczny, ponieważ nie występuje w nim w żadnym miejscu dzielenie przez 0. Krok rachunków zawsze można zadeklarować jako liczbę, a nie iloraz. Dla k=0 algorytm nie pracuje. Natomiast zwielokrotniając okres obiegu (Rys. 2d – 250 razy) upewniamy się o stabilności i efektywności algorytmu dla odpowiednio wybranych k.
Dokładność postępowania rekurencyjnego zależy od wielkość kroku rachunków k. Rysunki 2a-d zdają się potwierdzać to logiczne twierdzenie … błąd jest proporcjonalny do kwadratu kroku k, jeżeli tysiąckrotnie zmniejszymy krok rachunków, to wynik będzie tysiąc milion razy dokładniejszy… [4].
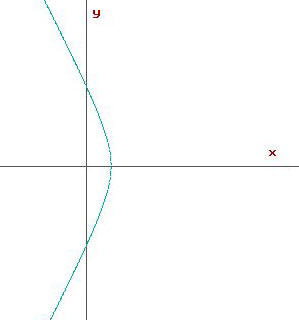
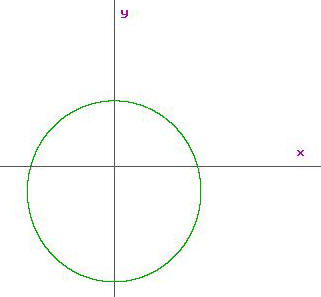
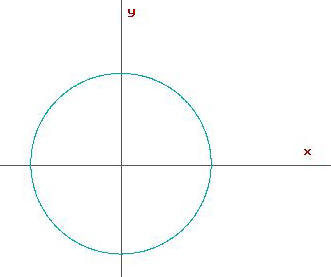
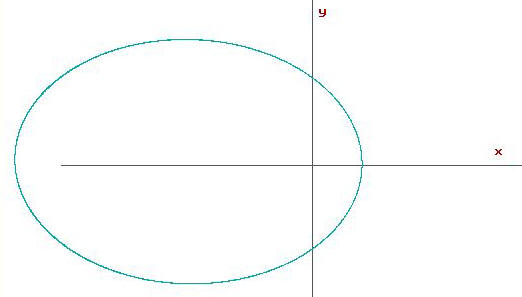
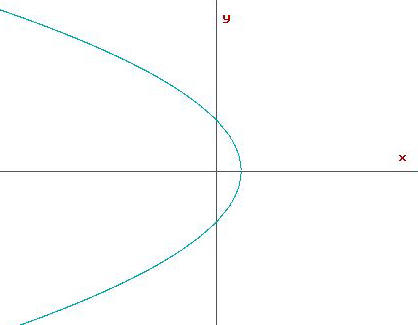
Krzywe, które są trajektoriami w problemie dwóch ciał są krzywymi stożkowymi: okrąg, elipsa, parabola, hiperbola, a w szczególnym przypadku dwie proste – krzywa stożkowa niewłaściwa.
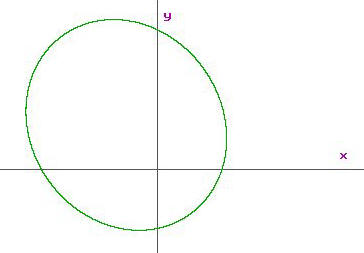
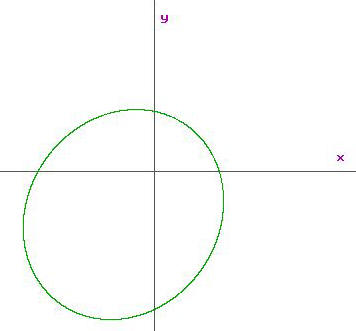
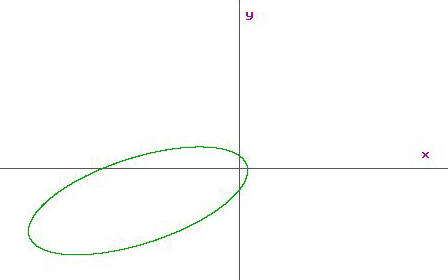
Na początek zajmijmy się elipsą i na jej przykładzie pokażemy jak kształt elipsy oraz jej położenie zależy od warunków początkowych (Rys. 3a-d, dalej program Listing 1).
Rys. 3
| a)
|
b)
|
| x = 0,5, y = 0 vx = 0,5, vy = 1,6 |
x = 0, y = 0 vx = -0,5, vy = 1,6 |
| c)
|
d)
|
| x = 0, y = 0,5 vx = 1,6, vy = 0 |
x = -0,5, y = -0,5 vx = 1,2, vy = -0,5 |
Rys. 4
| a)
|
1-sza prędkość kosmiczna:
|
| b)
|
 (tutaj vyo = 1,82),
(tutaj vyo = 1,82), |
| c)
|
2-ga prędkość kosmiczna
Zwiększając ilość kroków obliczeń i oraz wyprowadzając na ekran wartość
promienia wodzącego
Aby uwidocznić drugą gałąź paraboli (podobnie z hiperbolą – p. Rys. 4c, d), zamiast linii:
|
| d)
|
 (tutaj vyo = 2,5)
(tutaj vyo = 2,5) |
Wszystkie powyższe rysunki możemy poglądowo zestawić na diagramie:
Rys. 5
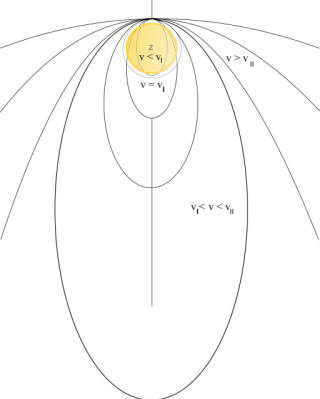 |
W szkole średniej rozpatrujemy rzut poziomy, czyli ruch w jednorodnym polu grawitacyjnym z prędkością początkową w płaszczyźnie prostopadłej do kierunku pola. Torem ruchu jest parabola o wierzchołku w punkcie rzutu. Odpowiada on ruchowi ciała rzuconego poziomo w polu grawitacyjnym Ziemi, z pewnej wysokości, przy założeniu braku oporu ruchu i prędkości znacznie mniejszej od I prędkości kosmicznej. Wówczas pole grawitacyjne Ziemi można uznać w przybliżeniu za jednorodne. Ale w rzeczywistości ruch odbywa się po elipsie o bardzo małym mimośrodzie, a środek Ziemi pokrywa się z jednym ognisk elipsy.
|
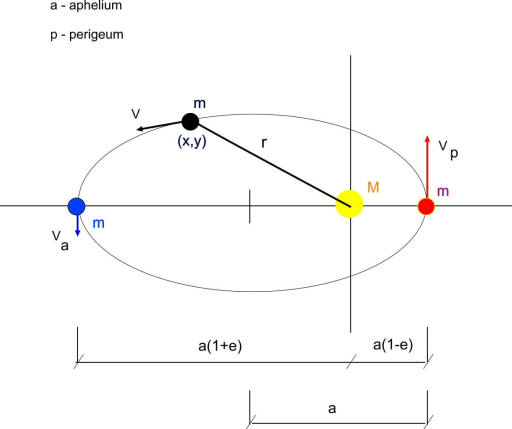
Pozostańmy przy tematyce astronomicznej. Dostosujmy Listing 1 do potrzeb dydaktycznych; przyjrzyjmy się dokładnie parametrom (zmiennym) występującym w programie. Prześledzimy jak zmieniają się współrzędne (x,y) planety w czasie, zbadamy wartości i znaki składowych prędkości [vx,vy], wyznaczymy odległość planety od Słońca (r), w tym odległość maksymalną (x max), mimośród orbity (e), półoś wielką (a), okres obiegu (T). Dlatego też Listing 2 jest bogato zaopatrzony w instrukcje wyprowadzające wartości zmiennych na ekran.
Rys. 6
'NUMERYCZNE OBLICZANIE ORBIT ‘ELEMENTY ORBITY Cls: Screen 9 Color 4, 45 Locate 12, 64: Print "x" Locate 2, 42: Print "y" Window(-320, 175)-(319, -174) Color 3, 63 Line (-250, 0) - (250, 0), 40: Line (0, 170) - (0, -170), 40 'WPROWADZANIE DANYCH Dim as double x, y, r, a, vx, vy, v, ax, ay, k Dim as double xmax, i, T, e Color 3, 63 'WARUNKI POCZĄTKOWE Locate 1, 2: Print "DANE WEJSCIOWE" x = 0.5: y = 0 Locate 1, 18: Print "xo="; x Locate 2, 18: Print "yo="; y vx = 0: vy = 1.95 Locate 1, 28: Print "vxo="; vx Locate 2, 28: Print "vyo="; vy Color 5, 63 xmax = x 'RACHUNKI ZASADNICZE (REKURENCJA) Color 44, 63 k = 1 / 10000 Locate 24, 2: Print "k="; k For i = 1 To 62200 Locate 24, 30: Print "i="; i Color 4, 63 x = x + vx * k: y = y + vy * k Locate 17, 52: Print "x="; x Locate 18, 52: Print "y="; y If Abs(x) > Abs(xmax) Then xmax = Abs(x) r = (x * x + y * y) ^ (-3/2) Locate 19, 52: Print "r="; r ^ (-1 / 3) Color 5, 63 ax = -x * r: ay = -y * r Locate 21, 52: Print "vx="; vx vx = vx + ax * k: vy = vy + ay * k Locate 22, 52: Print "vy="; vy v = Sqr(vx * vx + vy * vy) Locate 23, 52: Print "v="; v Color 1,63 Pset(150 * x, 150 * y) Locate 2, 52: Print "xmax="; xmax Next Color 34, 63 a = 0.5 * (xmax + x) Locate 4, 52: Print "a="; a e = (xmax - a) / a Locate 5, 52: Print "e="; e T = k * i Locate 6, 52: Print "T="; T Sleep |
W razie potrzeby dodatkowo możemy prześledzić składowe i wartość całkowitego przyspieszenia, kąt między wektorami przyspieszenia i promienia wodzącego, prędkość ucieczki, itp. Otwiera to możliwości różnych zastosowań.
 | I Liceum Ogólnokształcące |
Pytania proszę przesyłać na adres email: i-lo@eduinf.waw.pl
W artykułach serwisu są używane cookies. Jeśli nie chcesz ich otrzymywać,
zablokuj je w swojej przeglądarce.
Informacje dodatkowe
 ,
,
 i długość wektora prędkości
i długość wektora prędkości  ,
stwierdzamy ławo, że gdy
,
stwierdzamy ławo, że gdy